Verehrte Leser, hier ein kurzes Video meiner neuesten Entwicklung:

🔗 Hinweis: Mit Klick auf das Thumbnail öffnet sich YouTube in einem neuen Tab. Dabei gelten die Datenschutzbestimmungen von YouTube. Weitere Informationen finden Sie in unserer Datenschutzerklärung.
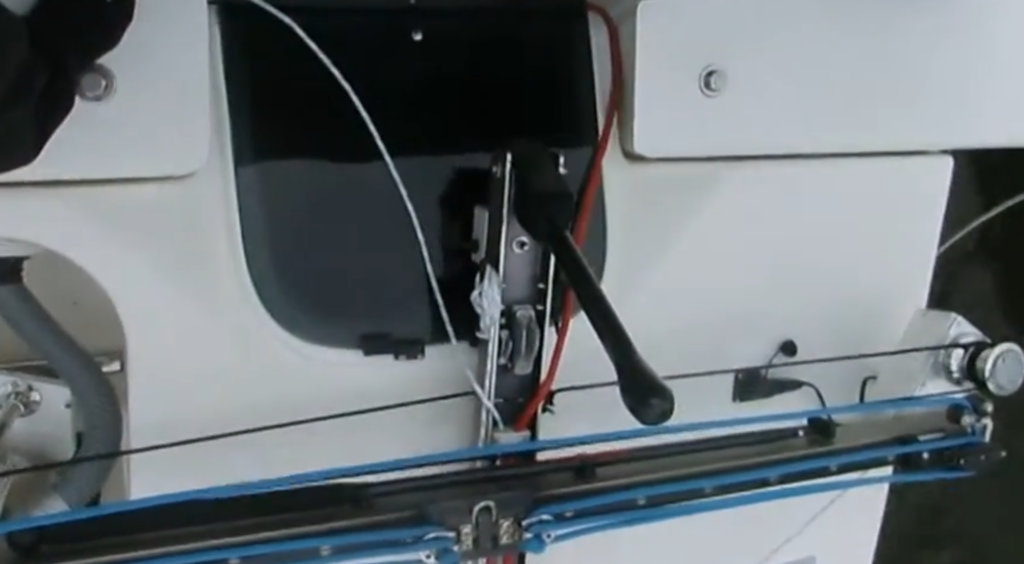
Es handelt sich um den RiPower-Pilot, ein Autopilot-System für Boote, das nicht nur die herkömmliche Lenkautomatik eines Autopiloten ermöglicht, sondern das Boot auch fernsteuerbar macht. Neben der Lenkung kann man auch den Motor steuern. Das System basiert auf dem Google Android-Betriebssystem für Smartphones und Tablets. Die Hardware wurde von mir entwickelt, und die Programmierung der App erhielt ich durch die Unterstützung von Thomas Manthey, einem professionellen Programmierer. Derzeit befindet sich sowohl Hard- als auch Software noch in der Testphase.
Wer mich kennt, weiß, dass ich bei allem, was ich mache, extremen Aufwand betreibe und keine Mühe scheue. Hier ein Beispiel anhand des Omnibot 2000:
- Schritt 1: Bau eines Koffer-PCs als „Gehirn“ für den Roboter
- Schritt 2: Bau eines Raumes für den Koffer-PC
- Schritt 3: Verlegung von Kabeln durch die Decke des Hauses, um den Empfang der Funk-Schnittstellen im gesamten Wohnraum zu verbessern
- Schritt 4: Umbau des Omnibot 2000 – der Kopf bekam zwei Servos, damit dieser drehbar sowie hebe- und senkbar ist. Als nächstes müssen vier Servos in den Armen untergebracht werden. Die Notsteuerung, die ich im Dezember für Demonstrationszwecke eingebaut hatte, wurde wieder entfernt.
Da das Thema Ladestation für E-Fahrzeuge seit Jahren allgegenwärtig und fast schon belästigend ist, hier ein humorvoller Ansatz – eine Roboterladestation! 😊




